
Si tuviéramos que resumir cómo es el guiado con el PHD y la SXV – Lodestar podríamos decir: muy agradecido. 😉
No se puede ni comparar con nuestra antigua DSI IIC.
La Lodestar tiene una sensibilidad impresionante, poco ruido y además es muy, pero que muy rápida capturando y descargando imágenes. Además las imágenes tienen una gran relación señal ruido, incluso en exposiciones de fracciones de segundo.
No obstante, todo esto no quita lo que comentamos en posts anteriores sobre la importancia de entender cómo trabaja el Osc-Index y su implicación en el RMS.
Tras muchas noches de mal tiempo, hoy hemos tenido una ventana sin nubes, que ha durado poco pero nos ha permitido probar bien el PHD con la Lodestar.
Las pruebas pretendían confirmar todo lo indicado en posts anteriores sobre técnicas de autoguiado con el PHD y comprobar cómo mitigar dentro de lo posible los efectos de cambios repentinos en el seeing, el viento y las finas capas de nubes bajas que impactan de lleno en los cálculos de la aplicación.
Comenzamos el test con los siguientes settings:
RA agr 45%, RA hys 5%, Mn mo 0,06, Mx RA 1000, Mx dec 1000, Dec Auto y capturas de 0,5 seg

En general hemos jugado constantemente con la Agr para mantener un Osc-Index entre 0,3 y 0,45
Tal y como indica el help del PHD, cuando el Osc-Index tiende a 1 bajamos la RA agr y cuando desciende por debajo de 0,3 aumentamos la RA agr. Los incrementos utilizados en nuestro caso son de 5% y 10% hasta conseguir estabilizar el valor de Osc-Index y RMS.
Nótese que en muchos casos esto implica hacer un Clear del gráfico y una vez conseguido el objetivo compensar poco a poco la RA agr en el sentido contrario de 5% en 5% hasta que el Osc-Index y el RMS se estabilizan. Lo mejor es practicarlo y no hacer cambios muy seguidos, digamos como mínimo darle 10-15 segundos entre cambios.
Seguro que más de uno se preguntará:
¡Pero cómo! ¿No se supone que es un AUTO guiado? ¿Por qué hay que tocar nada una vez se consiguen unos valores que estabilizan el guiado al principio de las capturas?
Si la noche es razonablemente buena, seeing estable, no tenemos contaminación lumínica muy dispar en el recorrido de nuestro objetivo, no hay rachas de viento, no se condensa humedad en el tele del guider, el montaje está bien balanceado, etc, etc… los valores iniciales tendrían que aguantar bien. Pero si las condiciones cambian, y en nuestro caso las condiciones cambian rápidamente, lo mejor es estar preparado y saber qué podemos hacer para que los problemas no se trasladen a la imagen final.
Tal y como se ve en posts anteriores es importante tener a mano una tabla de relaciones entre la resolución de nuestro guider y el imager.
Con nuestra configuración de prueba (guider EZG-60 + Lodestar, imager ED80 + Canon 400D Mod) la relación está en 0,26. Esto significa que si mantenemos el RMS en 0,13 o menos, tendremos un error máximo de 0,5 píxeles en la Canon.
![]()
Como se verá en las capturas de imágenes siguientes, durante todo el test nuestra EQ6 ha requerido de una RA agr generalmente baja para mantener un Osc-Index entre 0,3 y 0,45 que nos dio un RMS dentro del margen que buscábamos (0,13 o menos).

Como prueba del resultado aquí va el preview de una Roseta al 33% sin procesar, bien definida y con estrellas puntuales.
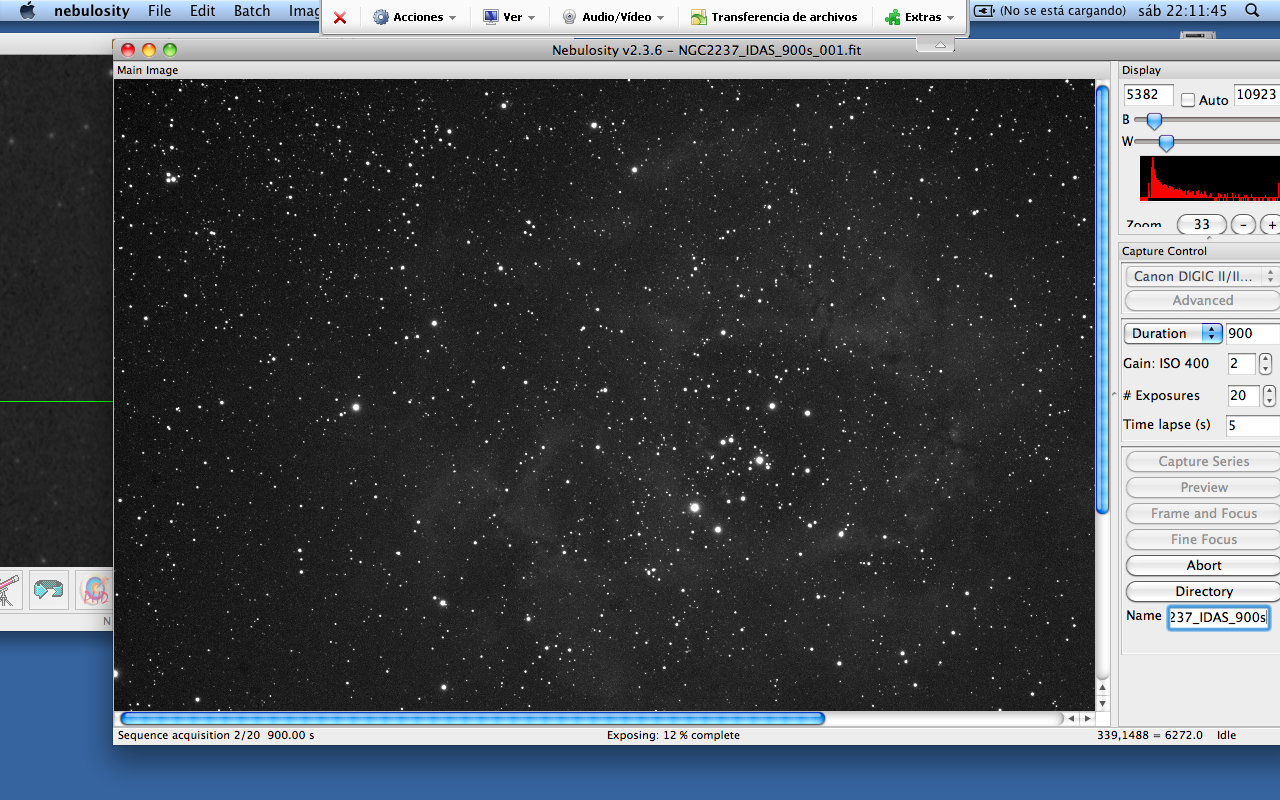
Claro que al 33% casi nunca se ven los defectos, lo honesto sería aumentar mucho el zoom para ver la calidad del guiado en la morfología de las estrellas. Pues bien, ahí va una parte minúscula del centro de la Roseta vista al 400%

Como se puede ver el guiado es impecable y eso desde un punto geográfico como el nuestro que es, en cuanto a la astrofotografía se refiere, un auténtico desastre climatológico y de contaminación lumínica.
Sigamos con el test
En la siguiente secuencia se ve como el viento entra en escena e impacta de lleno en la Dec.
Inmediatamente subimos la RA agr a 0,75 para que corrija de forma más brusca puesto que el viento persiste.
Tras unos segundos el truco funciona.

Una vez desaparece el episodio de viento y al comprobar que el exceso de RA agr comienza a provocar muchos «rebotes», devolvemos la RA agr a un valor más bajo (0,45 en nuestro caso).
Es importante no perder de vista el valor de RMS. Independientemente de si la curva en el gráfico es más o menos plana, si el Osc-Index se mantiene en los valores correctos y el RMS está la mayor parte del tiempo dentro del margen que nos habíamos fijado, la imagen final saldrá bien.
No hay que obsesionarse con tener un gráfico plano. Si está dentro del rango (50% inferior a la resolución del imager) no hay por qué preocuparse.
He aquí el ejemplo al 400% de la segunda captura del centro de la Roseta.
Como se ve, el episodio de viento no se aprecia en absoluto en la imagen final.

En la siguiente captura volvemos a la rutina, con la única diferencia de que al levantarse una brisa constante, decidimos ser más agresivos con el Mn mo (0,05 –> 0,03) para que la montura reaccione más rápidamente a la hora de mitigar los efectos del viento. El resto está igual que antes RA agr 45%, que nos mantiene entre los 0,3 y 0,45 de Osc-Index y nos da un RMS de 14 o menos.

De tanto en tanto pulsamos el botón Clear y dejamos que haga unas 25-50 capturas para «refrescar» el cálculo del Osc-Index sin tener en cuenta el histórico. Esto es conveniente tras las rectificaciones para mitigar cambios debidos al viento, puesto que de otra forma los valores se verían «suavizados» por el peso de la media de los datos históricos del gráfico.

En el ejemplo siguiente se aprecian dos cosas: primera, el viento golpea en el centro del gráfico y nos obliga a subir la RA agr a 75. Conseguimos corregir, pero luego el Osc-Index no refleja inmediatamente el impacto de mantener el 75% de Agr.
Segundo, como se ve al final y aunque el Osc-Index no lo refleje, la RA agr es excesiva y «genera muchos rebotes». Por tanto se necesita disminuir su valor para evitar los rebotes (en nuestro caso hasta 50% o 45%). Si no estamos seguros de este comportamiento, siempre podríamos pulsar Clear y esperar unos 10 – 15 segundos para observar como el Osc-Index, sin el peso de los datos históricos, se mantendría por encima de 0,5 indicando claramente la necesidad de una reducción del valor del RA agr.

Tras estos contratiempos con el viento y los ajustes puntuales entre valores de 75% y vuelta al 40% – 45% observamos que el resultado del guiado al 200% fue igualmente muy bueno.
La calidad de la imagen es inferior a las anteriores debido a que la aplicación de control remoto reduce los bits de representación de color para mantener la velocidad de respuesta. No obstante, la morfología de las estrellas se ve perfectamente y se puede comprobar que el guiado es muy bueno.

La siguiente parte del test la podríamos denominar «Milagros a Lourdes»
Y… ¿qué pasa cuando el viento y la humedad comienzan a crear nubes bajas de rápida evolución?
Pues eso… milagros a Lourdes.
Aún y todo veamos cómo se detecta y qué se puede hacer.
Si la imagen en el PHD se va deteriorando poco a poco, lo notaremos en el gráfico, puesto que este se volverá cada vez más errático y difícil de controlar. Si además el cambio en la calidad del cielo es importante, se acabará haciendo visible en la imagen de la Lodestar.
Aquí podemos ver cómo se veía nuestra estrella guía al comenzar la sesión de Test y como se ve una hora más tarde.

Como se puede ver, con una RA agr del 40% no conseguimos bajar el Osc-Index y además el RMS se nos dispara muy por encima de los 0,13 de nuestro objetivo. (El límite en nuestro caso para que se observe un error de 1 pixel en la Canon es de 0,26 en el RMS)
Aún y todo, el resultado al 400% es muy bueno en cuanto a guiado, aunque no se pueda aprovechar la imagen puesto que el fondo ya está muy iluminado. Como se ve en la segunda imagen, la Roseta prácticamente se ha difuminado.


Las condiciones ya son pésimas. Tenemos viento y finas sábanas de nubes que van pasando y se aprecian claramente en la imagen de la Lodestar en el PHD.
Pero vamos a seguir aunque sólo sea para poner a prueba lo aprendido y ver si con todo en contra conseguimos que el guiado sea aceptable. Es obvio que esto ya sería parte de un ejercicio de laboratorio puesto que el resultado no se podrá utilizar para apilar al tener las imágenes un SNR muy bajo.
Como se ve en las siguientes capturas, seguimos ajustando la RA agr para intentar mantener un Osc-Index entre 0,3 y 0,45 y mantenemos el Mn mo en 0,02 para que el PHD haga todas las correcciones necesarias tan pronto como se detecten, puesto que todo juega en nuestra contra y los cambios son muy rápidos. En principio esto no tendría sentido y deberíamos buscar lo contrario, hacer exposiciones largas y no actuar (Mn mo) hasta que los cambios fueran muy evidentes/necesarios para no «pasar» la inestabilidad del cielo al guiado. Pero en la práctica, cuando todo juega en nuestra contra y subimos el Mn mo a 0,07 el gráfico literalmente se nos desmadra.

")
Aún y todo conseguimos un guiado que a muchos ya les gustaría 😉
Como se ve al 400% y aunque el fondo ya es completamente blanco, las estrellas tienen una deformación evidente, pero no la que cabría esperar visto el gráfico, el RMS de 0,22 y las condiciones climáticas reales percibidas.

Como resumen final podríamos indicar que:
1) Es muy importante tener una tabla con las relaciones entre el imager y el guider para saber con exactitud cuál es nuestro RMS objetivo (50% de la resolución del imager) y nuestro RMS límite.
2) Encontrar los valores de RA agr que mantengan el guiado con un Osc-Index por debajo del 0,5 y por encima del 0,3 y que además generen el RMS sostenido más bajo posible. (Esto dependerá de cada montura y las condiciones locales del cielo).
3) Una vez encontrado ese valor o rango de valores, estar atentos a los cambios que se pudieran dar durante el guiado y ajustar la RA agr en intervalos de +- 5% +-10% para intentar corregirlos.
4) Una vez contrarrestado el problema, pulsar el botón Clear, observar el comportamiento del Osc-Index y RMS y tras unos cuantos ciclos (15 seg , pero esto depende del tiempo de exposición seleccionado) volver a actuar con la RA agr según sea necesario. (Cuando el viento desaparece, el exceso de RA agr provocará un Osc-Index elevado que tendremos que controlar).
Otros puntos importantes a considerar:
1) Una cámara como la SXV-Lodestar es muy útil puesto que nos permite capturar tomas de 0,5 seg con un SNR elevado.
2) En nuestro caso la resolución del conjunto EZG-60 / Lodestar es de 7,5 arc/sec por pixel, lo cual lo hace bastante resistente a los problemas de seeing, pero puede ser una resolución demasiado baja para guiar bien tubos de más de 1m como el VISAC, incluso a f6.4, (Para el caso del ED80 es más que suficiente como se puede ver en los ejemplos con la Roseta).
3) Para aquellos que como nosotros tengan una EQ6 o una HEQ5, es importante indicar que en nuestro caso, en su día hicimos una revisión y ajuste mecánico en profundidad de las monturas para subsanar variables (backlash excesivo en RA/DEC, oscilaciones horizontales de los bisinfines, problemas con los cojinetes, etc…) que por sí solas invalidaban todo lo que hemos expuesto.
Pero… ¿Realmente hace falta hacer todo esto?
La respuesta rápida es «claro que no».
Podemos dejar que el PHD se vaya adaptando a la situación o podemos ayudarle puntualmente.
Por supuesto si no intervenimos, el PHD lo detectará y corregirá por sí solo, pero si las condiciones son persistentemente adversas como es nuestro caso, el resultado se verá una vez sí y otra también en la imagen final.
Digamos que la ayuda extra con el control puntual y semi manual de la RA agr, evita dentro de lo posible, que los tiempos largos de detección y corrección automática de los problemas se acaben trasladando a la imagen final.