
Ajustar los parámetros del PHD puede ser complicado, sobre todo si no se sabe qué controlan… 😉
La RA agr y la RA hys están relacionadas con el Osc-Index, de ahí que valga la pena releer de tanto en tanto la ayuda del PHD para refrescar qué hacen y cómo lo hacen, especialmente si pasamos períodos prolongados sin hacer fotos.
Según la ayuda del PHD…
«In the lower-left of the graph, an «oscilliation index» is shown. This is the result of calculating (in the current window’s worth of data), the odds that the current RA move is in the opposite direction as the last RA move. If you are too aggressive in your guiding and over-shooting the mark each time, this number will head towards 1.0. If you were perfect and not over- or under-shooting and your mount had no periodic error, the score would be 0.5. Perfect with periodic error and the score may be closer to 0.3. If this score gets very low (e.g., 0.1), you may want to increase the RA aggressiveness (and/or decrease the hysteresis). If it gets quite high (e.g., 0.8), you may want to decrease the RA aggressiveness (and/or increase the hysteresis).»
Durante la noche del 5 al 6 de noviembre, con un seeing y una transparencia muy buenas, los settings que utilizamos con excelente resultado fueron estos:
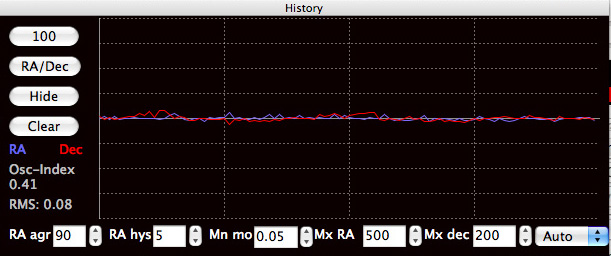
Como se puede ver, el Osc-Index es de 0,41 y la RA agr y la RA hys están al 90% y al 5% respectivamente. Tal y como indica la ayuda de PHD, muy cerca del valor óptimo.
Como la noche era muy estable, el seeing muy bueno y las estrellas en el campo de la DSI IIC de una mag muy baja (alto SNR), pudimos hacer capturas muy rápidas. (0,2 seg).
Esta alta frecuencia de captura permite detectar los problemas a tiempo, aunque si el seeing es malo (lo normal en la Bisbal) y/o el campo de la imagen presenta estrellas de magnitud media o alta, como es habitual con las zonas de DSOs, la experiencia nos dice que es mejor no bajar de 1 – 0,5 seg en la captura, para aumentar así el SNR y minimizar el efecto del seeing.

En cuanto al RMS, es el valor cuadrático medio (del inglés: root mean square), por tanto lo que mide es el promedio de las variaciones que se dan entre el eje y los picos positivos y negativos del gráfico. El valor que vemos indicado es la raíz cuadrada de la media aritmética de los cuadrados de las variaciones.
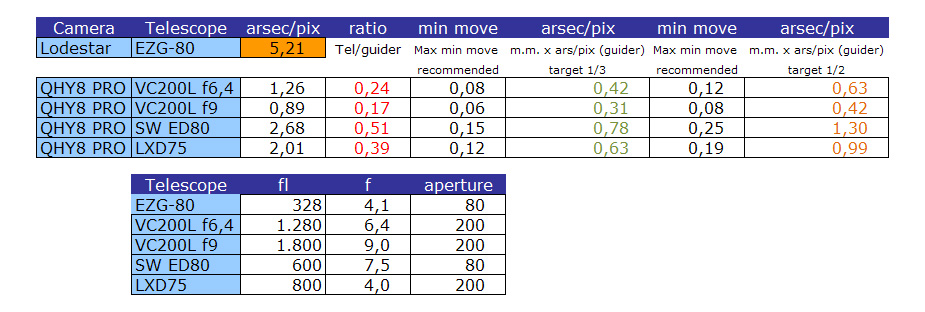
Pero es importante indicar que para saber exactamente el error que representa hay que conocer la resolución concreta arcsec/pixel de la cámara y tubo guía utilizado.
Estas son las tablas para las distintas configuraciones de tubo guía / cámara del guider y lo que representan en la configuración de la imagen final (tubo imager / ccd APS)
![]()
![]()
![]()
La columna con datos en rojo es el RMS que implicaría una variación equivalente a 1 pixel en la imagen final.
La columna en verde es el RMS equivalente a un desplazamiento de 1/3 de pixel en la imagen final.
La columna que está a la izquierda es el min move que hay que poner para aplicar una corrección cuando la variación pase de 1/3 de pixel de la cámara de la imagen final.
Por último la columna en naranja es el RMS equivalente a un desplazamiento de 1/2 pixel en la imagen final y su valor de min move para actuar llegado a ese umbral.
Todo esto es la teoría por supuesto y en principio funciona, así lo hemos comprobado.
Pero no hay que descuidar nada, puesto que otras variables por pequeñas que sean pueden impactar tanto que haga imposible guiar bien. Por ejemplo, un equipo mal balanceado y con un backlash considerable reflejará picos bruscos y muy difíciles de controlar por el PHD. Cualquier holgura entre el telescopio y el guider también provocará problemas que se reflejarán un zig zag exagerado en el gráfico. El viento es otro factor importante si el telescopio está expuesto y como es obvio, cualquier problema interno de la montura.
En nuestro caso, tanto a la EQ6 y a la HEQ5 les queda muy poco de sus piezas originales, todos los cojinetes han sido sustituidos, se limpió y reengrasó tanto los cojinetes como las coronas y volvimos a ajustar los sinfines. También hemos sustituido los tornillos originales de regulación de altitud y azimut y por si esto fuera poco, la instalación de la EQ6 está sobre una columna de hormigón de 40 cm de lado y la HEQ5 sobre una columna de hierro, que aunque móvil, es mucho más sólida y firme que el trípode original.
En resumen, que para que el PHD pueda trabajar bien y las tablas sean de utilidad, primero hay que eliminar/minimizar cualquier variable extra que pudiera por sí sola desvirtuar completamente los cálculos del PHD.

{kind=link}
{kind=link}